Wolfworks Experimental
2025-2026
Mach-et

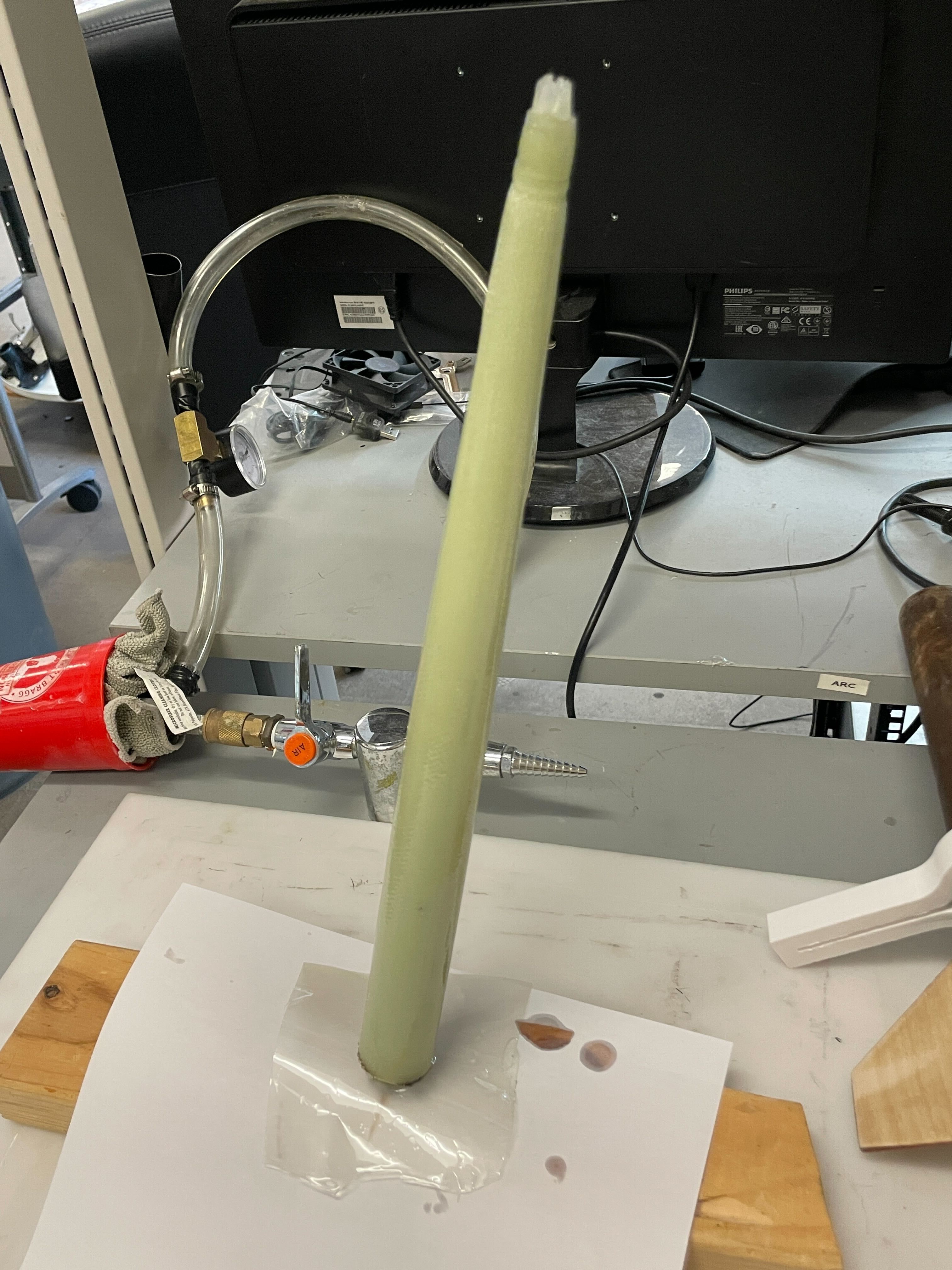
Machet is the first submin diameter rocket our club has made. The goal of it is to reach Mach 3 with an apogee of just under 17k feet. In order to gain more room for our avionics and parachutes without hurting the drag & weight, it features a very long noseconde with a 10:1 ratio.
Project FIRM

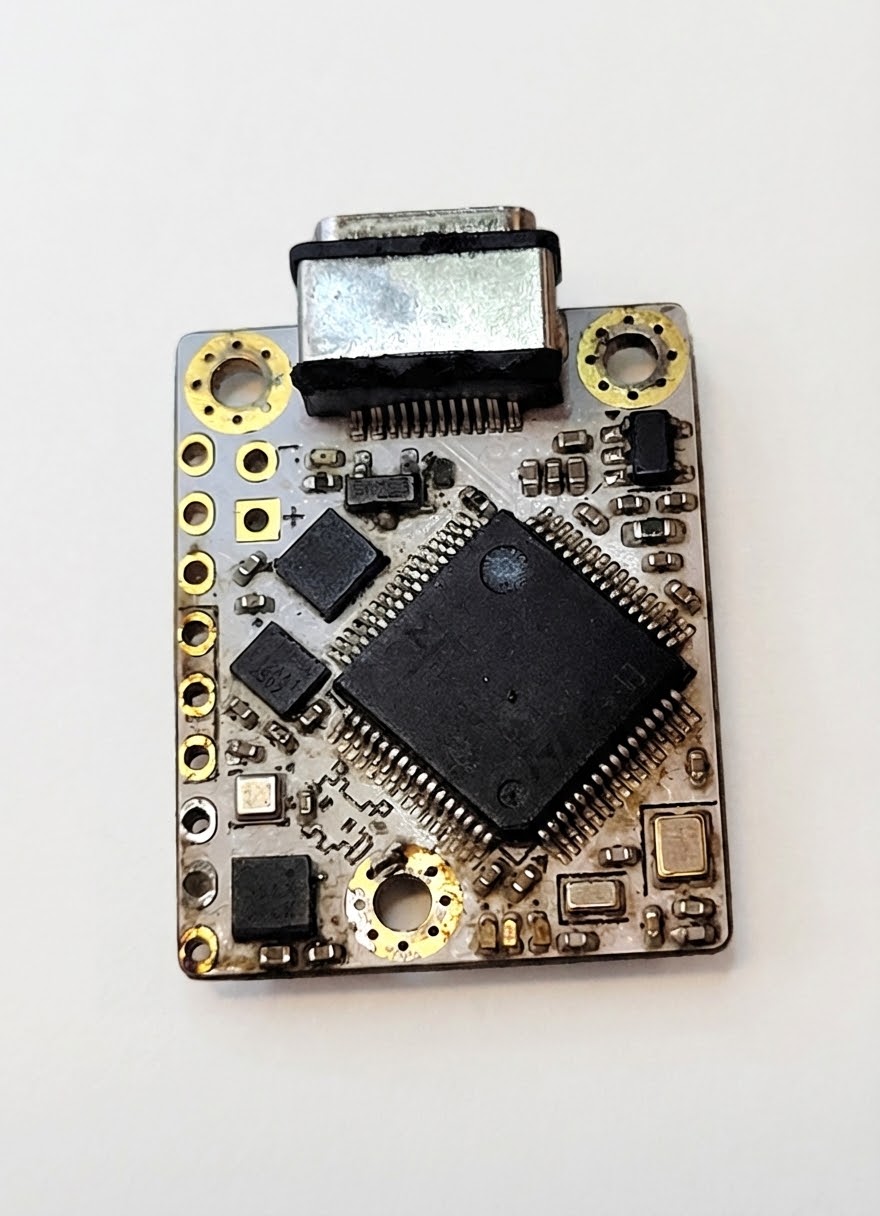
Project FIRM (Filtered Inertial Rotation Module) is a multifaceted solution to address pain points in payload development and airbrake development. It is a custom-designed PCB with hand-picked sensors to perform data collection during rocket flights and process the data through a Kalman Filter for high accuracy.
FIRM has expanded the club’s knowledge in both practical hardware design and robust software practices, with the intended goal of being a reliable and reusable module that can be inserted into any rocket for a variety of payload missions. You can view our docs for it here.
2024-2025
Barbenheimer


Project Barbenheimer was our club’s first staged rocket and one of our first rockets made using composite wet layups. It helped pave the way for our 2025-2026 senior design rockets which are also made using composites.
Squakit


Squakit was one of our first attempts at making a custom composite airframe. We wrapped fiberglass around a cardboard shipping container, and painted it like a creeper from Minecraft. We launched it successfully during the 2024 and 2025 interest launches. Squakit taught us about how to roll fiberglass tubes and some creative sealing methods.
2023-2024
Pencil Pusher


Pencil Pusher was the first supersonic rocket we made, built with a fiberglass airframe and carbon fiber-reinforced sandwich composite fins with a birch core. It included a custom telemetry system and flew successfully to Mach 1.4 in 2023 and Mach 2.0 in 2024 with apogee around 10k and 15k feet respectively.
Rover

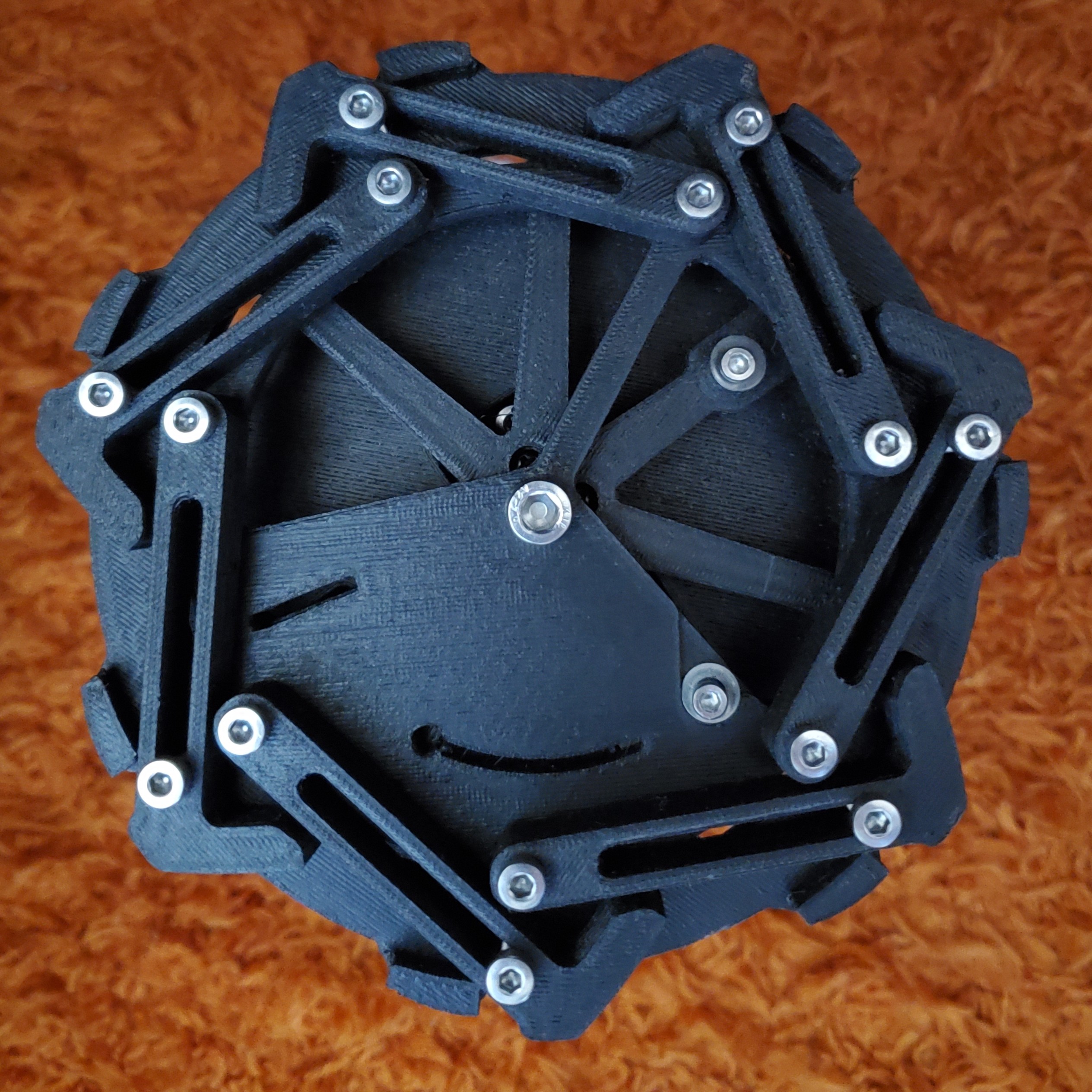
In Spring 2023, the WolfWorks Experimental team designed, built, tested, and flew a fully 3D-printed rover. Made out of CF-PETG material, the rover was designed to drive on the farm we launch at in Grantsboro, NC. It contains 2 continuous servo motors, 5 positional servos, an ultrasonic sensor, buck converters, an Arduino Uno, and a LiPo battery. The body was designed to just fit inside a 6″ diameter body tube to maximize internal space for electronics, with wheels that can expand an additional 3″ dia. for easier traversal of rough terrain. It has a parachute release mechanism to avoid parachute entanglement as well as driving stabilizers. You can read more about it here.
